
免费咨询热线
0571-852787786
0571-852787786

YYVIP易游新闻
NEWS 更新时间:2025-12-23
更新时间:2025-12-23 点击次数:
点击次数:
YYVIP易游·(中国有限公司)官方网站芯片尺寸:全画幅36x24mm,光阑:1,2,3,4mm可切换,最小瞳距:70mm,对焦距离:0.3m至无穷远
提供不同倍数的ND滤光片,最高亮度可测50000cd/㎡,最低亮度可测0.001 cd/㎡
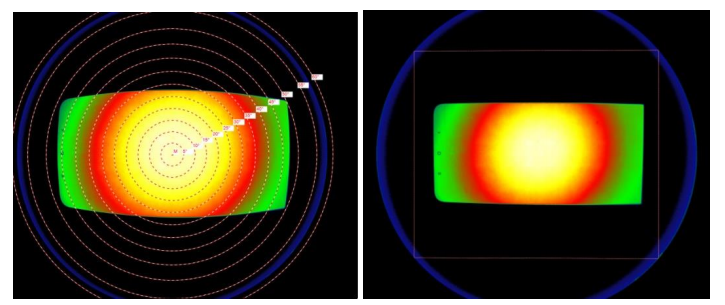
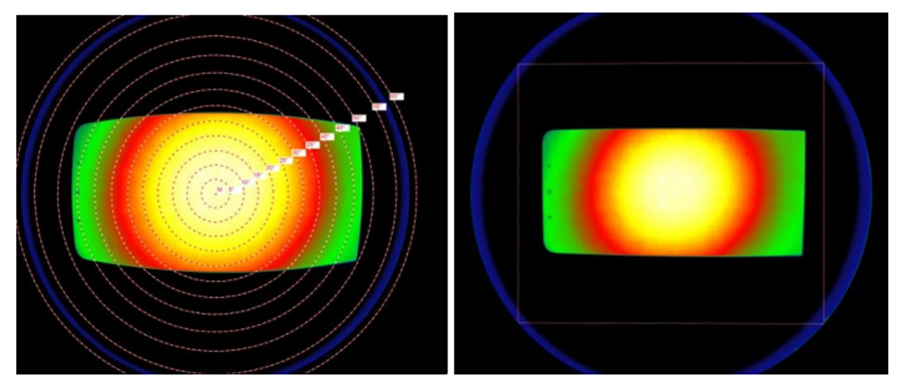
NED 近眼显示测量设备采用的锥光镜头,通过镜头畸变实现大视场的测量,因此采用采用锥光镜头进行测量之前需要对成像系统进行畸变修正,软件通过对锥光镜头成像角度进行空间校准,将角度(θ,φ)对应的亮度信息转换为直角坐标系统(x,y)对应的亮度信息。
分别测量近眼显示设备的黑白画面的平均亮度,给出黑白对比度的结果,软件通过阈值隔离的算法单独计算出白画面区域中的平均亮度Lw,并自动记忆白画面分析时的所有像素,在进行黑画面分析时只分析白画面测量时记忆的区域,避免黑画面时干扰光的影响,得到黑画面平均亮度Lb。白画面亮度变化较大时,也可分别计算白黑画面对应位置的亮度对比度(例如九点)
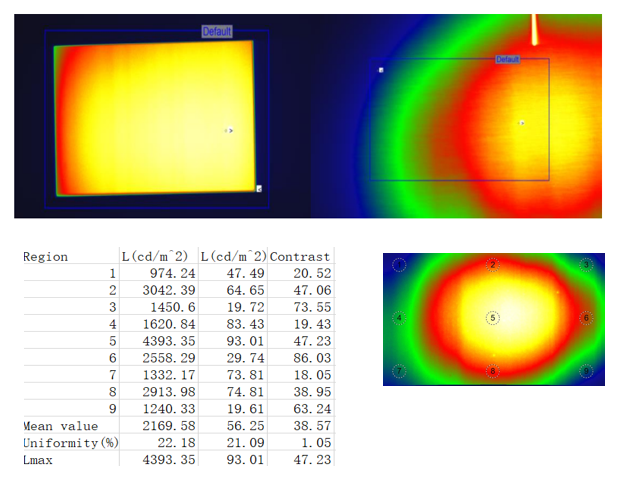
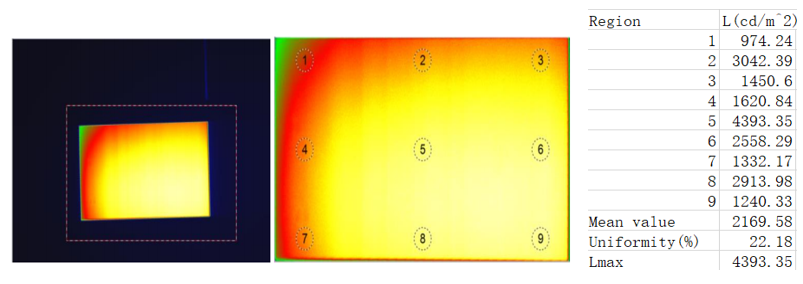
锥光镜头测量的亮度画面通过畸变修正后,软件首先识别白画面边界四个点的位置,由于画面可能存在倾斜,所以软件通过四个边界点将白画面区域进行四边形到矩形的坐标变换,对坐标变换后的图像进行九点亮度分析或者所有像素点亮度分析,得到九个点或者所有像素点的亮度值,找出最大值Lmax、最小值Lmin、平均值Lave,计算九个点的亮度均匀性或者整个面的的亮度均匀性。均匀性提供三种计算方式,为最小比最大,最小比平均,最大减最小比最大。这里以最小比最大为例:LNU = (L min/Lmax) x100%
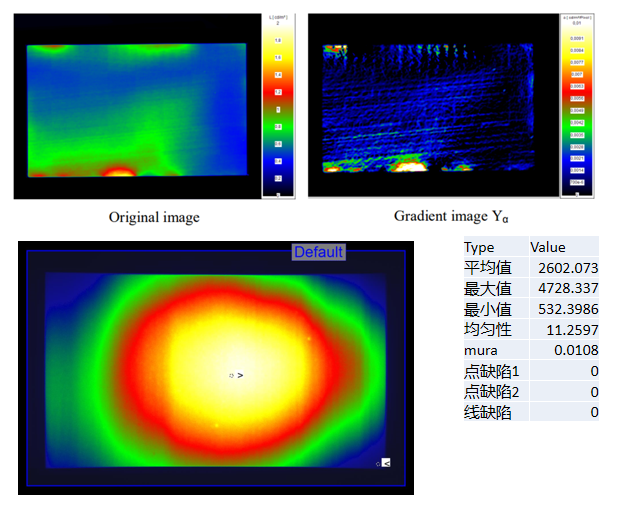
近眼显示系统由于成像显示屏幕距离人眼只有几个厘米,因此其均匀性、点线以及mura 缺陷将更加明显,软件通过测量黑白画面的亮度。经过处理,处理后的画面将会把亮度变化较大的区域突出显示出来,缺陷区域将突出显示,根据强度判断mura缺陷程度,给出点线、mura 等的缺陷结果。首先测量得到整个画面的亮度,每个像素点的Mura值以该点N*N梯度算子计算该点的亮度变化情况,找到每个点的Mura Y_α(i,j);找到mura 画面中缺陷最大值Y_α,max。
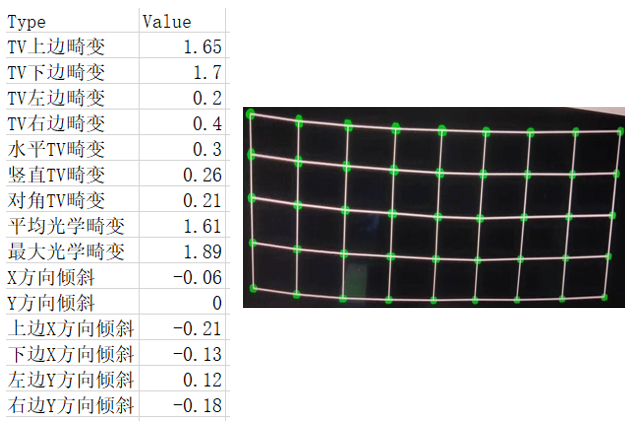
通过点阵图分析产品的畸变、倾斜等成像之类指标。相机拍摄点阵图并通过畸变校正后,软件通过亮度阈值将画面中的所有点找到,并计算中每个点的中心坐标,根据点中心坐标的相对位置的差异计算TV畸变或光学畸变。
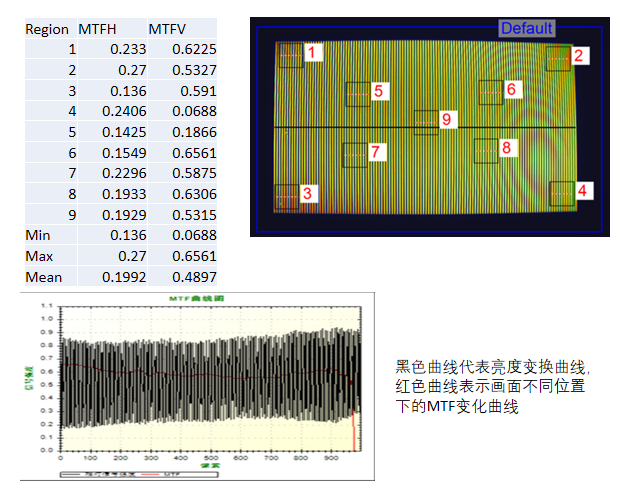
软件可以生成不同像素间隔和黑白条纹测试图像,软件得到黑白条纹的亮度图后,计算条纹画面不同位置下的横向或纵向的亮度变化曲线,根据曲线中的亮度最大值Lmax和亮度最小值Lmin。对于原来调制度为M 的正弦光栅,如果经过镜头到达像平面的像的调制度为M ’ ,则
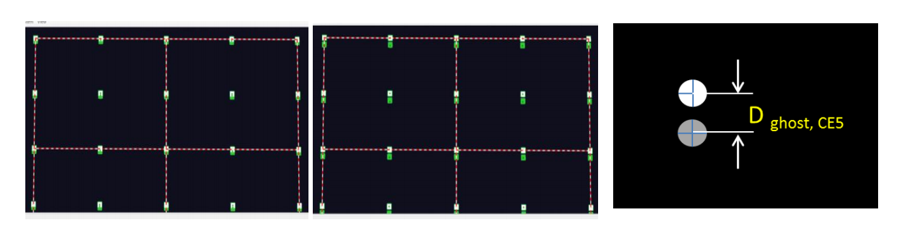
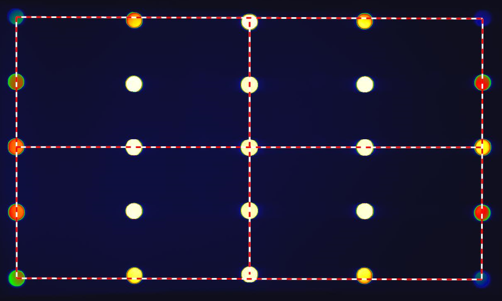
重影分析采用规则布置的圆形或矩形点阵,软件通过阈值处理算法识别主画面以及重影区域。分别计算主画面和重影区域的几何中心和像素面积,根据所占面积的差异确定重影的偏差角度,不管重影区域与原图像点连接还是分离,均可自动计算和识别两个区域。
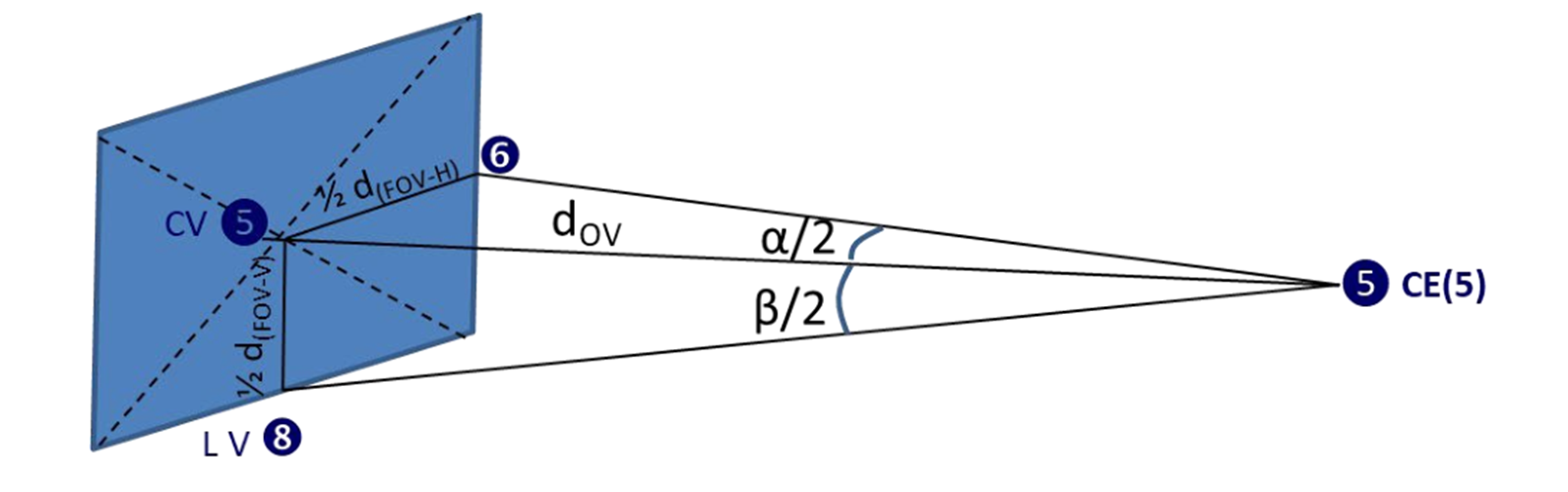
软件分别测量半视场白、红、绿、蓝画面,以亮度的 10%做为阈值分别计算横向视场和纵向视场,得到对应的视场ω_i、ω_red、ω_green、ω_blue后,根据不同颜色画面的视场差异计算近眼显示设备的色散,计算公式如下:

软件分别测量红、绿、蓝画面,以亮度的 10%做为阈值分别找到画面的上下左右四个边界,分别计算左右两侧、上下两侧和对角的像素距离,根据镜头焦距计算产品视场角,视场角包括水平视场角、竖直视场角和对角视场角。
采用白画面,根据产品的分辨率和计算出来的视场得到产品的角分辨率。根据软件计算出来的水平视场H和竖直视场V,以及产品对应的分辨率w*h(有效分辨率),计算角分辨率。
采用白画面,根据产品像素和相机像素的对应关系,计算成像到相机上产品的有效像素数。软件通过畸变校正后得到的图像,在相机上横线所占像素h,竖线上所占像素v,根据产品分辨率计算产品像素和相机像素的比例r,根据成像到相机上的有效面积S,计算有效像素
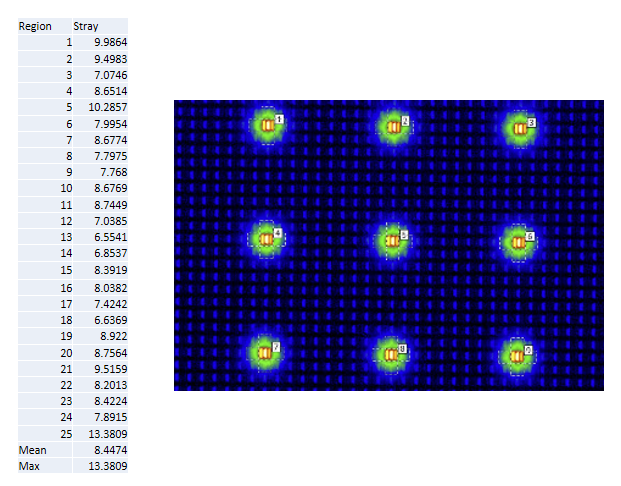
杂光定义为在眼位字符周边产生的杂散光。软件通过畸变校正得到的矩形点阵图像,通过阈值分析算法抓到每个点的区域,分别画出点阵部分亮度Lv和点阵四周四个区域的平均亮度Ls,计算杂光比例S。
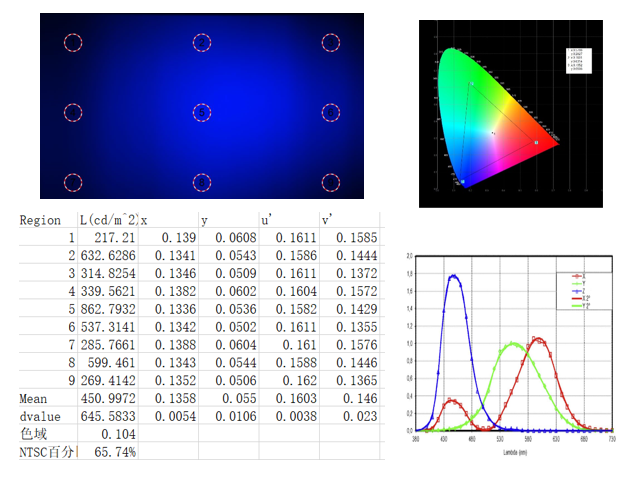
测量白、红、绿、蓝画面的色温、色坐标、色差等。成像色度计采用四个滤光片模拟人眼标准色度观察曲线,分别获得测量画面的三刺激值XYZ,通过XYZ计算色坐标、色温、色差等指标,从而得到色域。
Eyebox定义为可观察全部FOV范围的眼动范围,其检测需要自动化配合,利用点阵图像或者中间点亮度来判断。

地址:深圳市宝安区西乡街道宝源路名优工业产品展示采购中心B座3楼B336
 当前位置:
当前位置: 
 服务热线
服务热线 浙江省杭州市拱墅区环城北路165号汇金国际大厦
浙江省杭州市拱墅区环城北路165号汇金国际大厦 laicailaicai@163.com
laicailaicai@163.com